- Matlab教程
- MATLAB - 主页
- MATLAB - 概述
- MATLAB - 环境设置
- MATLAB - 语法
- MATLAB - 变量
- MATLAB - 命令
- MATLAB - M 文件
- MATLAB - 数据类型
- MATLAB - 运算符
- MATLAB - 决策
- MATLAB - 循环
- MATLAB - 向量
- MATLAB - 矩阵
- MATLAB - 数组
- MATLAB - 冒号表示法
- MATLAB - 数字
- MATLAB - 字符串
- MATLAB - 函数
- MATLAB - 数据导入
- MATLAB - 数据输出
- MATLAB 高级版
- MATLAB - 绘图
- MATLAB - 图形
- MATLAB - 代数
- MATLAB - 微积分
- MATLAB - 微分
- MATLAB - 集成
- MATLAB - 多项式
- MATLAB - 变换
- MATLAB - GNU Octave
- MATLAB - Simulink
- MATLAB 有用资源
- MATLAB - 快速指南
- MATLAB - 有用的资源
- MATLAB - 讨论
MATLAB - Simulink
Simulink 是一个用于动态和嵌入式系统的仿真和基于模型的设计环境,与 MATLAB 集成。Simulink 也是由 MathWorks 开发的,是一种数据流图形化编程语言工具,用于建模、仿真和分析多域动态系统。它基本上是一个图形框图工具,具有可定制的块库集。
它允许您将 MATLAB 算法合并到模型中,并将仿真结果导出到 MATLAB 中以供进一步分析。
Simulink 支持 -
- 系统级设计
- 模拟
- 自动代码生成
- 嵌入式系统的测试和验证
MathWorks 以及第三方硬件和软件产品提供了多种其他附加产品,可与 Simulink 一起使用。
以下列表给出了其中一些的简要描述 -
Stateflow允许开发状态机和流程图。
Simulink Coder允许自动生成 C 源代码以实时实现系统。
xPC Target与基于 x86 的实时系统一起提供了在物理系统上实时模拟和测试 Simulink 和 Stateflow 模型的环境。
Embedded Coder支持特定的嵌入式目标。
HDL Coder允许自动生成可综合的 VHDL 和 Verilog。
SimEvents提供了用于建模排队系统的图形构建块库。
Simulink 能够通过建模风格检查、需求可追溯性和模型覆盖率分析来系统地验证和验证模型。
Simulink Design Verifier 允许您识别设计错误并生成用于模型检查的测试用例场景。
使用 Simulink
要打开 Simulink,请在 MATLAB 工作空间中输入 -
simulink
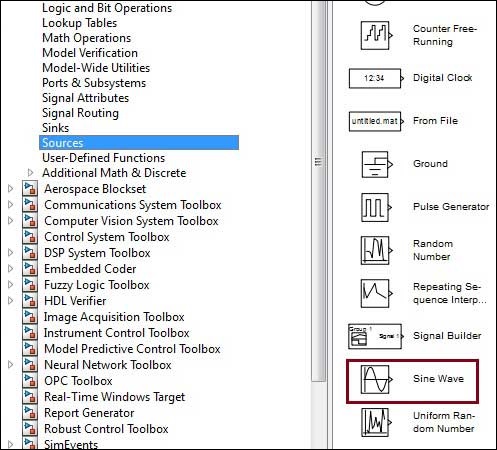
Simulink 将通过库浏览器打开。库浏览器用于构建仿真模型。

在左侧窗格中,您会发现几个根据不同系统分类的库,单击每个库将在右侧窗格中显示设计块。
建筑模型
要创建新模型,请单击库浏览器工具栏上的新建按钮。这将打开一个新的无标题模型窗口。
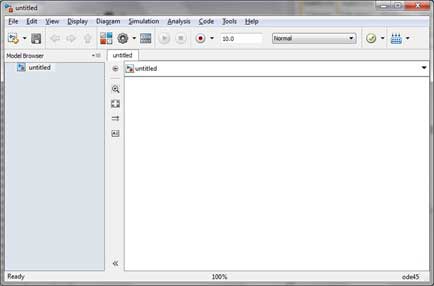
Simulink 模型是一个框图。
通过从库浏览器中选择适当的元素并将它们拖到模型窗口中来添加模型元素。
或者,您可以复制模型元素并将其粘贴到模型窗口中。
例子
从 Simulink 库中拖放项目来创建您的项目。
出于本示例的目的,将使用两个块进行模拟 -源(信号)和接收器(示波器)。信号发生器(源)生成模拟信号,然后示波器(接收器)以图形方式显示该信号。

首先将所需的块从库拖动到项目窗口。然后,将块连接在一起,这可以通过将连接器从一个块上的连接点拖动到另一个块上的连接点来完成。
让我们将“正弦波”块拖到模型中。
从库中选择“Sinks”,然后将“Scope”块拖到模型中。

将信号线从 Sine Wave 模块的输出拖到 Scope 模块的输入。


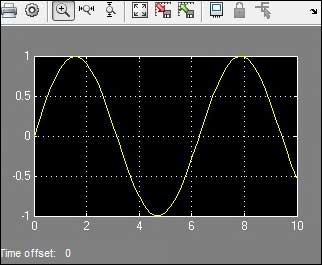
按“运行”按钮运行模拟,保持所有参数默认(您可以从“模拟”菜单更改它们)
您应该从示波器中得到下图。