
- 控制系统教程
- 控制系统 - 主页
- 控制系统 - 简介
- 控制系统 - 反馈
- 数学模型
- 机械系统建模
- 机械系统的电气类比
- 控制系统 - 框图
- 框图代数
- 框图简化
- 信号流图
- 梅森增益公式
- 时间响应分析
- 一阶系统的响应
- 二阶系统响应
- 时域规格
- 稳态误差
- 控制系统 - 稳定性
- 控制系统 - 稳定性分析
- 控制系统 - 根轨迹
- 根轨迹的构建
- 频率响应分析
- 控制系统 - 波特图
- 波特图的构建
- 控制系统 - 极坐标图
- 控制系统 - 奈奎斯特图
- 控制系统 - 补偿器
- 控制系统 - 控制器
- 控制系统 - 状态空间模型
- 状态空间分析
- 控制系统有用的资源
- 控制系统 - 快速指南
- 控制系统 - 有用资源
- 控制系统 - 讨论
控制系统 - 极坐标图
在前面的章节中,我们讨论了波特图。在那里,我们有两个单独的图,分别表示幅度和相位作为频率的函数。现在让我们讨论极坐标图。极坐标图是可以在幅度和相位之间绘制的图。这里,幅度仅由正常值表示。
$G(j\omega)H(j\omega)$ 的极坐标形式为
$$G(j\omega)H(j\omega)=|G(j\omega)H(j\omega)| \角度 G(j\omega)H(j\omega)$$
极坐标图是通过将 $\omega$ 从 0 变化到 ∞ 来在 $G(j\omega)H(j\omega)$ 的幅度和相位角之间绘制的图。极坐标图表如下图所示。
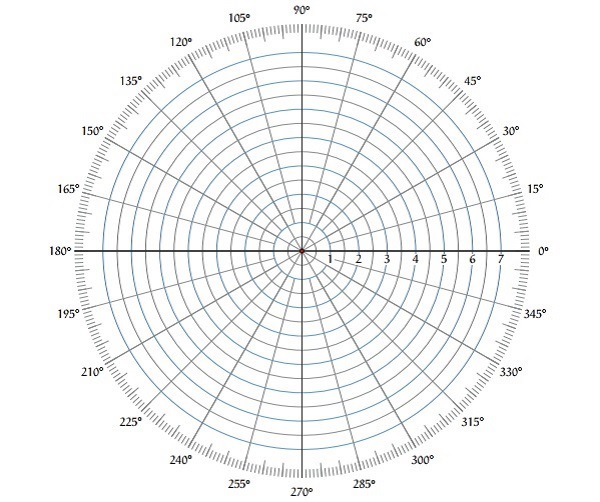
该图表由同心圆和径向线组成。同心圆和径向线分别表示幅度和相位角。这些角度由逆时针方向的正值表示。类似地,我们可以用负值表示顺时针方向的角度。例如,逆时针方向的角度270 0等于顺时针方向的角度-90 0 。
绘制极坐标图的规则
请遵循以下规则来绘制极坐标图。
将 $s = j\omega$ 代入开环传递函数中。
写出 $G(j\omega)H(j\omega)$ 的幅度和相位表达式。
通过代入 $\omega = 0$ 求出 $G(j\omega)H(j\omega)$ 的起始幅度和相位。因此,极坐标图以该幅度和相位角开始。
通过代入 $\omega = \infty$ 求出 $G(j\omega)H(j\omega)$ 的结束幅度和相位。因此,极坐标图以该幅度和相位角结束。
检查极坐标图是否与实轴相交,通过使 $G(j\omega)H(j\omega)$ 的虚数项等于 0 并找到 $\omega$ 的值。
检查极坐标图是否与虚轴相交,通过使 $G(j\omega)H(j\omega)$ 的实项等于 0 并找到 $\omega$ 的值。
为了更清楚地绘制极坐标图,通过考虑 $\omega$ 的其他值来找到 $G(j\omega)H(j\omega)$ 的幅度和相位。
例子
考虑闭环控制系统的开环传递函数。
$$G(s)H(s)=\frac{5}{s(s+1)(s+2)}$$
让我们使用上述规则绘制该控制系统的极坐标图。
步骤 1 - 将 $s = j\omega$ 代入开环传递函数中。
$$G(j\omega)H(j\omega)=\frac{5}{j\omega(j\omega+1)(j\omega+2)}$$
开环传递函数的大小为
$$M=\frac{5}{\omega(\sqrt{\omega^2+1})(\sqrt{\omega^2+4})}$$
开环传递函数的相位角为
$$\phi=-90^0-\tan^{-1}\omega-\tan^{-1}\frac{\omega}{2}$$
步骤 2 - 下表显示了开环传递函数在 $\omega = 0$ rad/sec 和 $\omega = \infty$ rad/sec 时的幅度和相位角。
| 频率(弧度/秒) | 震级 | 相位角(度) |
|---|---|---|
| 0 | 无穷大 | -90或270 |
| 无穷大 | 0 | -270或90 |
因此,极坐标图从 (∞,−90 0 ) 开始,到 (0,−270 0 )结束。括号内的第一项和第二项分别表示幅度和相位角。
步骤 3 - 根据起始和结束极坐标,该极坐标图将与负实轴相交。负实轴对应的相位角为-180 0或180 0。因此,通过将开环传递函数的相位角等于 −180 0或 180 0,我们将得到 $\omega$ 值 $\sqrt{2}$。
通过将 $\omega = \sqrt{2}$ 代入开环传递函数的幅度,我们将得到 $M = 0.83$。因此,当 $\omega = \sqrt{2}$ 且极坐标为 (0.83,−180 0 )时,极坐标图与负实轴相交。
因此,我们可以利用极坐标图表上的上述信息绘制极坐标图。