雷达系统 - 延迟线消除器
在本章中,我们将了解雷达系统中的延迟线消除器。顾名思义,延迟线引入了一定量的延迟。因此,延迟线主要用于延迟线消除器,以引入脉冲重复时间的延迟。
延迟线消除器是一种滤波器,可消除从静止目标接收的回波信号的直流分量。这意味着,它允许从非静止目标(即移动目标)接收到的回波信号的交流分量。
延迟线消除器的类型
根据延迟线消除器中存在的延迟线的数量,延迟线消除器可以分为以下两种类型。
- 单延迟线消除器
- 双延迟线消除器
在后续部分中,我们将详细讨论这两个延迟线消除器。
单延迟线消除器
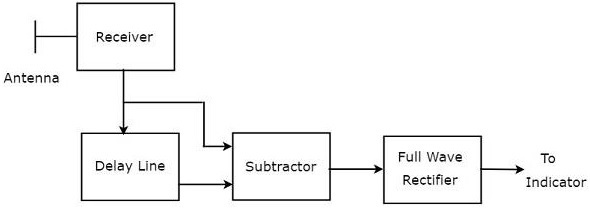
延迟线和减法器的组合称为延迟线消除器。它也称为单延迟线消除器。具有单延迟线消除器的MTI接收器的框图如下图所示。
我们可以将多普勒效应后接收到的回波信号的数学方程写为 -
$$V_1=A\sin\left [ 2\pi f_dt-\phi_0 \right ]\:\:\:\:\:方程\:1$$
在哪里,
A是视频信号的幅度
$f_d$ 是多普勒频率
$\phi_o$ 是相移,它等于 $4\pi f_tR_o/C$
通过将公式 1 中的 $t$ 替换为 $t-T_P$,我们将得到Delay line canceller 的输出。
$$V_2=A\sin\left [ 2\pi f_d\left ( t-T_P\right )-\phi_0 \right ]\:\:\:\:\:方程\:2$$
在哪里,
$T_P$ 是脉冲重复时间
我们通过从方程 1 中减去方程 2得到减法器输出。
$$V_1-V_2=A\sin\left [ 2\pi f_dt-\phi_0 \right ]-A\sin\left [ 2\pi f_d\left ( t-T_P\right )-\phi_0 \right ]$$
$$\Rightarrow V_1-V_2=2A\sin\left [ \frac{ 2\pi f_dt-\phi_0-\left [ 2\pi f_d\left ( t-T_P \right )-\phi_0 \right ]}{2 }\right ]\cos\left [ \frac{ 2\pi f_dt-\phi_o+2\pi f_d\left ( t-T_P \right )-\phi_0 }{2}\right ]$$
$$V_1-V_2=2A\sin\left [ \frac{2\pi f_dT_P}{2} \right ]\cos\left [ \frac{2\pi f_d\left ( 2t-T_P \right )-2\ phi_0}{2} \右]$$
$$\Rightarrow V_1-V_2=2A\sin\left [ \pi f_dT_p \right ]\cos\left [ 2\pi f_d\left ( t-\frac{T_P}{2} \right )-\phi_0 \right ]\:\:\:\:\:方程\:3$$
减法器的输出用作全波整流器的输入。因此,全波整流器的输出如下图所示。它只不过是单个延迟线消除器的频率响应。
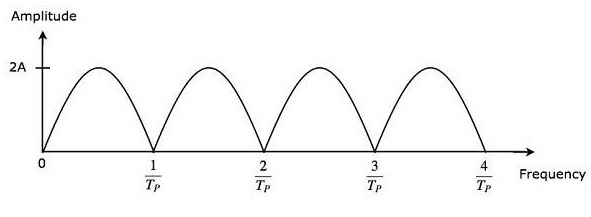
从公式 3 可以看出,当 $\pi f_dT_P$ 等于$\pi$的整数倍时,单延迟线消除器的频率响应变为零,这意味着 $\pi f_dT_P$ 等于 $n\ pi$ 从数学上来说,它可以写成
$$\pi f_dT_P=n\pi$$
$$\右箭头 f_dT_P=n$$
$$\Rightarrow f_d=\frac{n}{T_P}\:\:\:\:\:方程\:4$$
从公式 4 中,我们可以得出结论,当多普勒频率 $f_d$ 等于脉冲重复时间 $T_P$ 的倒数整数倍时,单个延迟线消除器的频率响应变为零。
我们知道脉冲重复时间和脉冲重复频率之间存在以下关系。
$$f_d=\frac{1}{T_P}$$
$$\Rightarrow \frac{1}{T_P}=f_P\:\:\:\:\:方程\:5$$
将公式 5 代入公式 4,我们将得到以下公式。
$$\Rightarrow f_d=nf_P\:\:\:\:\:方程\:6$$
从等式6中,我们可以得出结论,当多普勒频率$f_d$等于脉冲重复频率$f_P$的整数倍时,单个延迟线消除器的频率响应变为零。
盲目速度
根据我们目前了解到的情况,当 $n$ 等于 0 时,单个延迟线消除器消除了从静止目标接收到的回波信号的直流分量。除此之外,当多普勒频率 $f_d$ 等于脉冲重复频率$f_P$ 的整数倍(非零)时,它还消除了从非静止目标接收到的回波信号的交流分量。
因此,单个延迟线消除器的频率响应变为零的相对速度称为盲速度。从数学上来说,我们可以将盲速 $v_n$ 的表达式写为 -
$$v_n=\frac{n\lambda}{2T_P}\:\:\:\:\:方程\:7$$
$$\Rightarrow v_n=\frac{n\lambda f_P}{2}\:\:\:\:\:方程\:8$$
在哪里,
$n$ 是一个整数,它等于 1、2、3 等
$\lambda$ 是工作波长
示例问题
MTI 雷达的工作频率为 6GHZ$,脉冲重复频率为 1KHZ$。找出该雷达的第一、第二和第三盲速。
解决方案
鉴于,
MTI雷达的工作频率,$f=6GHZ$
脉冲重复频率,$f_P=1KHZ$。
以下是用工作频率 f 表示的工作波长$\lambda$的公式。
$$\lambda=\frac{C}{f}$$
将 $C=3\times10^8m/sec$ 和 $f=6GHZ$ 代入上式中。
$$\lambda=\frac{3\times10^8}{6\times10^9}$$
$$\右箭头\lambda=0.05m$$
因此,当工作频率f为$6GHZ$时,工作波长$\lambda$等于$0.05m$。
我们知道以下盲速公式。
$$v_n=\frac{n\lambda f_p}{2}$$
通过将 $n$=1,2 & 3 代入上述方程,我们将分别得到第一、第二和第三盲速的以下方程。
$$v_1=\frac{1\times \lambda f_p}{2}=\frac{\lambda f_p}{2}$$
$$v_2=\frac{2\times \lambda f_p}{2}=2\left ( \frac{\lambda f_p}{2} \right )=2v_1$$
$$v_3=\frac{3\times \lambda f_p}{2}=3\left ( \frac{\lambda f_p}{2} \right )=3v_1$$
将 $\lambda$ 和 $f_P$ 的值代入第一盲速方程中。
$$v_1=\frac{0.05\times 10^3}{2}$$
$$\右箭头 v_1=25m/sec$$
因此,对于给定的规格,第一盲速$v_1$ 等于 $25m/sec$。
通过代入以下值,我们将得到第二和第三盲速的值分别为 $50m/sec$ 和 $75m/sec$