
- 控制系统教程
- 控制系统 - 主页
- 控制系统 - 简介
- 控制系统 - 反馈
- 数学模型
- 机械系统建模
- 机械系统的电气类比
- 控制系统 - 框图
- 框图代数
- 框图简化
- 信号流图
- 梅森增益公式
- 时间响应分析
- 一阶系统的响应
- 二阶系统响应
- 时域规格
- 稳态误差
- 控制系统 - 稳定性
- 控制系统 - 稳定性分析
- 控制系统 - 根轨迹
- 根轨迹的构建
- 频率响应分析
- 控制系统 - 波特图
- 波特图的构建
- 控制系统 - 极坐标图
- 控制系统 - 奈奎斯特图
- 控制系统 - 补偿器
- 控制系统 - 控制器
- 控制系统 - 状态空间模型
- 状态空间分析
- 控制系统有用的资源
- 控制系统 - 快速指南
- 控制系统 - 有用资源
- 控制系统 - 讨论
控制系统 - 框图代数
框图代数只不过是涉及框图基本元素的代数。该代数涉及代数方程的图形表示。
块的基本连接
两个块之间存在三种基本连接类型。
串联
串联也称为级联。在下图中,两个具有传递函数 $G_1(s)$ 和 $G_2(s)$ 的块串联连接。

对于这种组合,我们将得到输出 $Y(s)$ 为
$$Y(s)=G_2(s)Z(s)$$
其中,$Z(s)=G_1(s)X(s)$
$$\右箭头 Y(s)=G_2(s)[G_1(s)X(s)]=G_1(s)G_2(s)X(s)$$
$$\Rightarrow Y(s)=\lbrace G_1(s)G_2(s)\rbrace X(s)$$
将此方程与输出方程的标准形式 $Y(s)=G(s)X(s)$ 进行比较。其中,$G(s) = G_1(s)G_2(s)$。
这意味着我们可以用一个块来表示两个块的串联连接。该单个块的传递函数是这两个块的传递函数的乘积。等效框图如下所示。

同样,您可以用单个块来表示“n”个块的串联连接。该单个块的传递函数是所有那些“n”个块的传递函数的乘积。
并联
并联连接的模块将具有相同的输入。在下图中,两个具有传递函数 $G_1(s)$ 和 $G_2(s)$ 的块并联连接。这两个块的输出连接到求和点。

对于这种组合,我们将得到输出 $Y(s)$ 为
$$Y(s)=Y_1(s)+Y_2(s)$$
其中,$Y_1(s)=G_1(s)X(s)$ 和 $Y_2(s)=G_2(s)X(s)$
$$\Rightarrow Y(s)=G_1(s)X(s)+G_2(s)X(s)=\lbrace G_1(s)+G_2(s)\rbrace X(s)$$
将此方程与输出方程的标准形式 $Y(s)=G(s)X(s)$ 进行比较。
其中,$G(s)=G_1(s)+G_2(s)$。
这意味着我们可以用一个块来表示两个块的并行连接。该单个块的传递函数是这两个块的传递函数之和。等效框图如下所示。

类似地,您可以用单个块来表示“n”个块的并行连接。该单个块的传递函数是所有那些“n”个块的传递函数的代数和。
反馈连接
正如我们在前面的章节中讨论的,反馈有两种类型——正反馈和负反馈。下图所示为负反馈控制系统。这里,具有传递函数 $G(s)$ 和 $H(s)$ 的两个块形成一个闭环。

求和点的输出为 -
$$E(s)=X(s)-H(s)Y(s)$$
输出 $Y(s)$ 是 -
$$Y(s)=E(s)G(s)$$
将 $E(s)$ 值代入上述方程中。
$$Y(s)=\left \{ X(s)-H(s)Y(s)\r大括号 G(s) \right\}$$
$$Y(s)\left \{ 1+G(s)H(s)\rbrace = X(s)G(s) \right\}$$
$$\Rightarrow \frac{Y(s)}{X(s)}=\frac{G(s)}{1+G(s)H(s)}$$
因此,负反馈闭环传递函数为$\frac{G(s)}{1+G(s)H(s)}$
这意味着我们可以用一个块来表示两个块的负反馈连接。该单个块的传递函数是负反馈的闭环传递函数。等效框图如下所示。

同样,您可以用一个块来表示两个块的正反馈连接。该单块的传递函数是正反馈的闭环传递函数,即$\frac{G(s)}{1-G(s)H(s)}$
求和点的框图代数
相对于块移动求和点有两种可能性 -
- 在块之后移动求和点
- 在块之前移动求和点
现在我们就针对上述两种情况一一看看需要做哪些安排。
在块之后移动求和点
考虑下图所示的框图。这里,求和点出现在块之前。

求和点有两个输入 $R(s)$ 和 $X(s)$。它的输出是$\left\{R(s)+X(s)\right\}$。
因此,块 $G(s)$ 的输入是 $\left \{R(s)+X(s)\right \}$ ,其输出是 –
$$Y(s)=G(s)\左\{R(s)+X(s)\右\}$$
$\Rightarrow Y(s)=G(s)R(s)+G(s)X(s)$ (方程 1)
现在,将求和点移到块之后。该框图如下图所示。

块 $G(s)$ 的输出是 $G(s)R(s)$。
求和点的输出为
$Y(s)=G(s)R(s)+X(s)$ (方程 2)
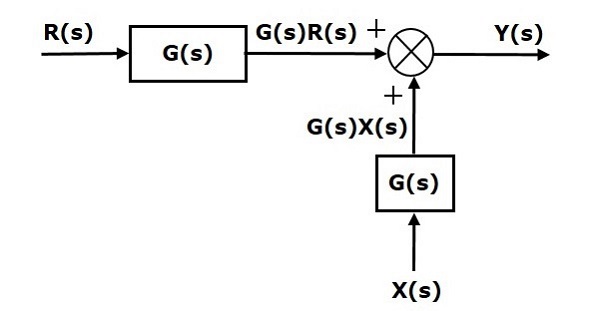
比较公式 1 和公式 2。
两个方程中的第一项 $'G(s) R(s)'$ 相同。但是,第二项有所不同。为了使第二项也相同,我们还需要一个块 $G(s)$。它具有输入 $X(s)$,并且该块的输出作为求和点的输入而不是 $X(s)$ 给出。该框图如下图所示。
在块之前移动求和点
考虑下图所示的框图。这里,求和点出现在块之后。
该框图的输出是 -
$Y(s)=G(s)R(s)+X(s)$ (公式 3)
现在,将求和点移到块之前。该框图如下图所示。
该框图的输出是 -
$Y(S)=G(s)R(s)+G(s)X(s)$ (方程式 4)
比较公式 3 和公式 4,
第一项 $'G(s) R(s)'$ 在两个方程中相同。但是,第二项有所不同。为了使第二项也相同,我们还需要一个块 $\frac{1}{G(s)}$。它具有输入 $X(s)$,并且该块的输出作为求和点的输入而不是 $X(s)$ 给出。该框图如下图所示。

起飞点的框图代数
相对于块移动起飞点有两种可能性 -
- 在区块后移动起飞点
- 将起飞点移至区块之前
现在我们就针对上述两种情况,一一看看要作什么样的安排。
在区块后移动起飞点
考虑下图所示的框图。在这种情况下,起飞点位于块之前。

这里,$X(s)=R(s)$ 和 $Y(s)=G(s)R(s)$
当您将起飞点移到块之后时,输出 $Y(s)$ 将相同。但是,$X(s)$ 值存在差异。因此,为了获得相同的 $X(s)$ 值,我们需要多一个块 $\frac{1}{G(s)}$。它的输入为 $Y(s)$,输出为 $X(s)$。该框图如下图所示。

将起飞点移至区块之前
考虑下图所示的框图。在这里,起飞点位于块之后。

这里,$X(s)=Y(s)=G(s)R(s)$
当您将起飞点移动到块之前时,输出 $Y(s)$ 将相同。但是,$X(s)$ 值存在差异。因此,为了获得相同的 $X(s)$ 值,我们需要多一个块 $G(s)$。它的输入为 $R(s)$,输出为 $X(s)$。该框图如下图所示。
