
- 控制系统教程
- 控制系统 - 主页
- 控制系统 - 简介
- 控制系统 - 反馈
- 数学模型
- 机械系统建模
- 机械系统的电气类比
- 控制系统 - 框图
- 框图代数
- 框图简化
- 信号流图
- 梅森增益公式
- 时间响应分析
- 一阶系统的响应
- 二阶系统响应
- 时域规格
- 稳态误差
- 控制系统 - 稳定性
- 控制系统 - 稳定性分析
- 控制系统 - 根轨迹
- 根轨迹的构建
- 频率响应分析
- 控制系统 - 波特图
- 波特图的构建
- 控制系统 - 极坐标图
- 控制系统 - 奈奎斯特图
- 控制系统 - 补偿器
- 控制系统 - 控制器
- 控制系统 - 状态空间模型
- 状态空间分析
- 控制系统有用的资源
- 控制系统 - 快速指南
- 控制系统 - 有用资源
- 控制系统 - 讨论
控制系统 - 控制器
各种类型的控制器用于提高控制系统的性能。在本章中,我们将讨论基本控制器,例如比例控制器、微分控制器和积分控制器。
比例控制器
比例控制器产生与误差信号成比例的输出。
$$u(t) \propto e(t) $$
$$\右箭头 u(t)=K_P e(t)$$
在两边应用拉普拉斯变换 -
$$U(s)=K_P E(s)$$
$$\frac{U(s)}{E(s)}=K_P$$
因此,比例控制器的传递函数为$K_P$。
在哪里,
U(s) 是驱动信号 u(t) 的拉普拉斯变换
E(s) 是误差信号 e(t) 的拉普拉斯变换
K P是比例常数
单位负反馈闭环控制系统与比例控制器的框图如下图所示。
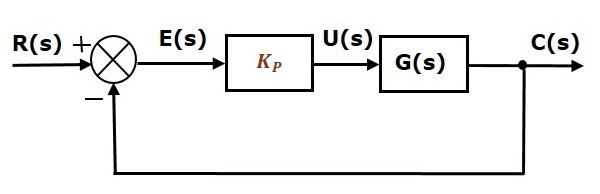
比例控制器用于根据要求改变瞬态响应。
微分控制器
微分控制器产生一个输出,该输出是误差信号的导数。
$$u(t)=K_D \frac{\text{d}e(t)}{\text{d}t}$$
在两侧应用拉普拉斯变换。
$$U(s)=K_D sE(s)$$
$$\frac{U(s)}{E(s)}=K_D s$$
因此,微分控制器的传递函数为$K_D s$。
其中,$K_D$ 是导数常数。
单位负反馈闭环控制系统与微分控制器的框图如下图所示。
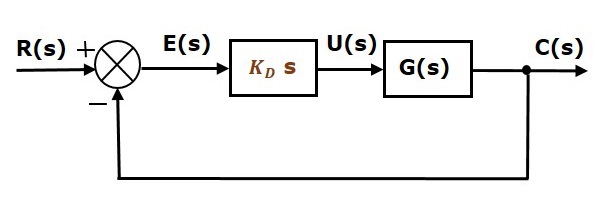
微分控制器的作用是使不稳定的控制系统变得稳定。
一体式控制器
积分控制器产生一个输出,该输出是误差信号的积分。
$$u(t)=K_I \int e(t) dt$$
在两边应用拉普拉斯变换 -
$$U(s)=\frac{K_I E(s)}{s}$$
$$\frac{U(s)}{E(s)}=\frac{K_I}{s}$$
因此,积分控制器的传递函数为$\frac{K_I}{s}$。
其中,$K_I$ 为积分常数。
单位负反馈闭环控制系统与积分控制器的框图如下图所示。
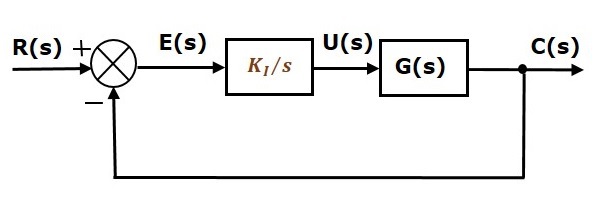
积分控制器用于减小稳态误差。
现在让我们讨论基本控制器的组合。
比例微分 (PD) 控制器
比例微分控制器产生一个输出,该输出是比例控制器和微分控制器的输出的组合。
$$u(t)=K_P e(t)+K_D \frac{\text{d}e(t)}{\text{d}t}$$
在两边应用拉普拉斯变换 -
$$U(s)=(K_P+K_D s)E(s)$$
$$\frac{U(s)}{E(s)}=K_P+K_D s$$
因此,比例微分控制器的传递函数为$K_P + K_D s$。
单位负反馈闭环控制系统与比例微分控制器的框图如下图所示。
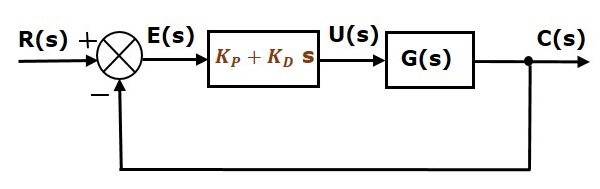
采用比例微分控制器在不影响稳态误差的情况下提高控制系统的稳定性。
比例积分 (PI) 控制器
比例积分控制器产生一个输出,该输出是比例控制器和积分控制器的输出的组合。
$$u(t)=K_P e(t)+K_I \int e(t) dt$$
在两边应用拉普拉斯变换 -
$$U(s)=\left(K_P+\frac{K_I}{s} \right )E(s)$$
$$\frac{U(s)}{E(s)}=K_P+\frac{K_I}{s}$$
因此,比例积分控制器的传递函数为$K_P + \frac{K_I} {s}$。
单位负反馈闭环控制系统与比例积分控制器的框图如下图所示。
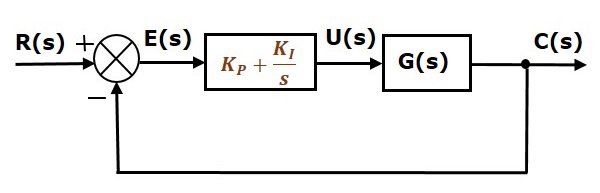
采用比例积分控制器在不影响控制系统稳定性的情况下减小稳态误差。
比例积分微分 (PID) 控制器
比例积分微分控制器产生一个输出,该输出是比例、积分和微分控制器的输出的组合。
$$u(t)=K_P e(t)+K_I \int e(t) dt+K_D \frac{\text{d}e(t)}{\text{d}t}$$
在两边应用拉普拉斯变换 -
$$U(s)=\left(K_P+\frac{K_I}{s}+K_D s \right )E(s)$$
$$\frac{U(s)}{E(s)}=K_P+\frac{K_I}{s}+K_D s$$
因此,比例积分微分控制器的传递函数为$K_P + \frac{K_I} {s} + K_D s$。
单位负反馈闭环控制系统与比例积分微分控制器的框图如下图所示。
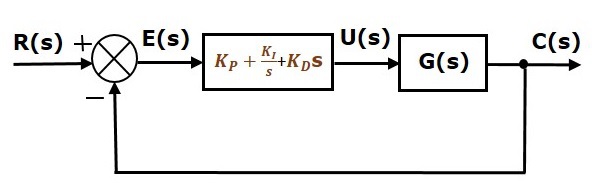
采用比例积分微分控制器来提高控制系统的稳定性,减小稳态误差。